SAR Description
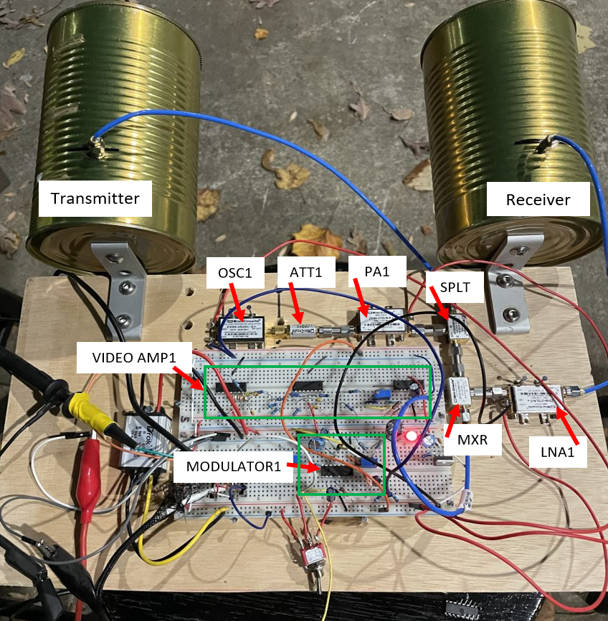
The Mobile Synthetic Aperture Radar (SAR) was my senior design project. The laptop-based SAR system can detect and determine a target’s range by using radio frequency (RF) waveforms while being transported on a mobile remote-controlled (RC) vehicle.
The code used for this project was MATLAB (waveform processing) and Arduino (vehicle movement). If you wish to download any of those pieces of code, please download the MATLAB code RIGHT HERE and the Arduino code RIGHT HERE. The code will also be located down below.
SAR Overview
Brief Project Description: The radar will travel 20 yards on the RC vehicle while processing waveforms perpendicular to the direction of the vehicle at 50 yards. The SAR device will identify the wall of the Engineering Technology Center located on the Marietta campus of Kennesaw State University, as well as other large objects in the path of the radar.
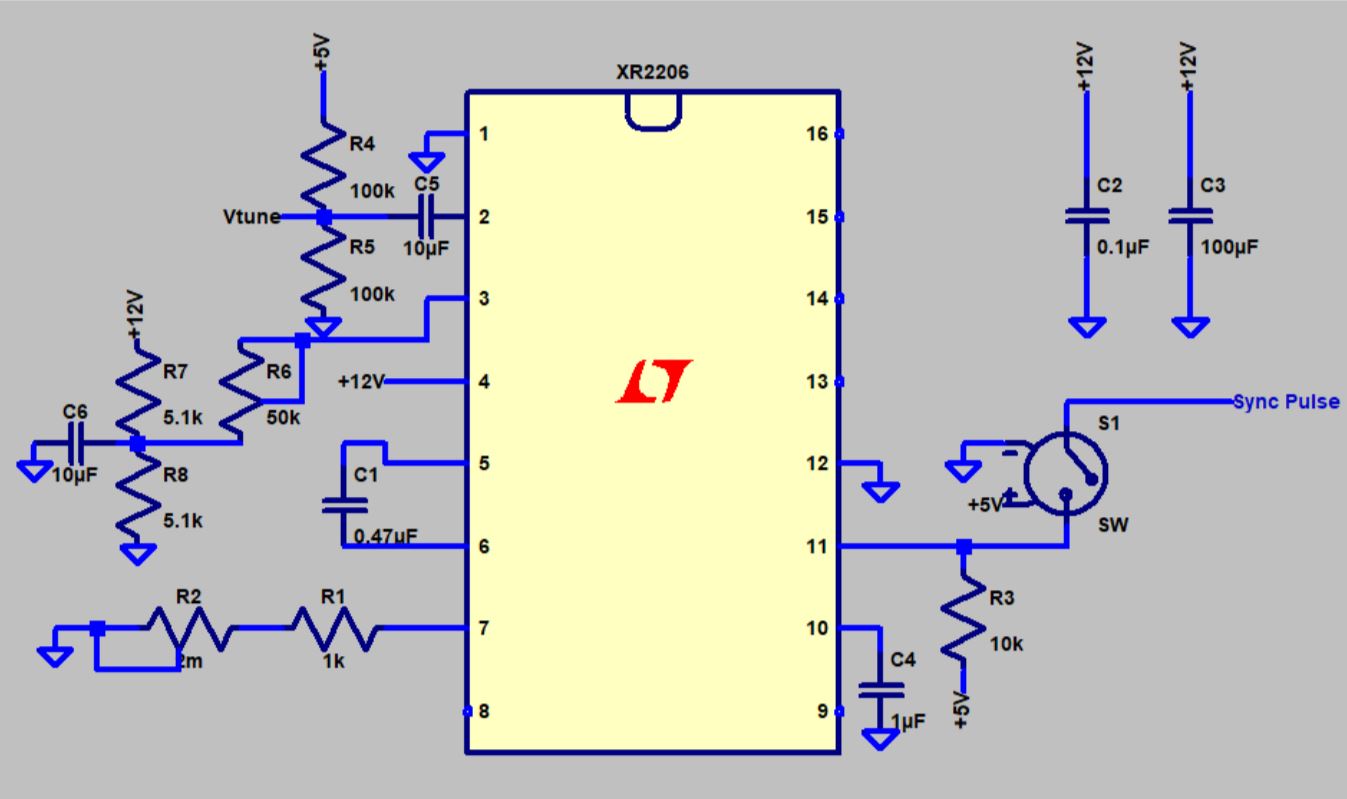
Hard Part of the Project: Understanding RF engineering was the hardest part of the project. I started the project with very minimum knowledge in RF so to catch up to speed, I had to research how radars, SARs, and RF components work. The next hardest part of the project was getting our function generator, chirping, frequency span, and sync pulse potentiometers lined up to make sure that the output waveform of our system wasn't chipping.